Die Herausforderungen der robotergesteuerten Pizzabäckerei meistern
Eine neue Technik könnte es einem Roboter ermöglichen, matschige Objekte wie Pizzateig oder weiche Materialien wie Kleidung zu manipulieren.
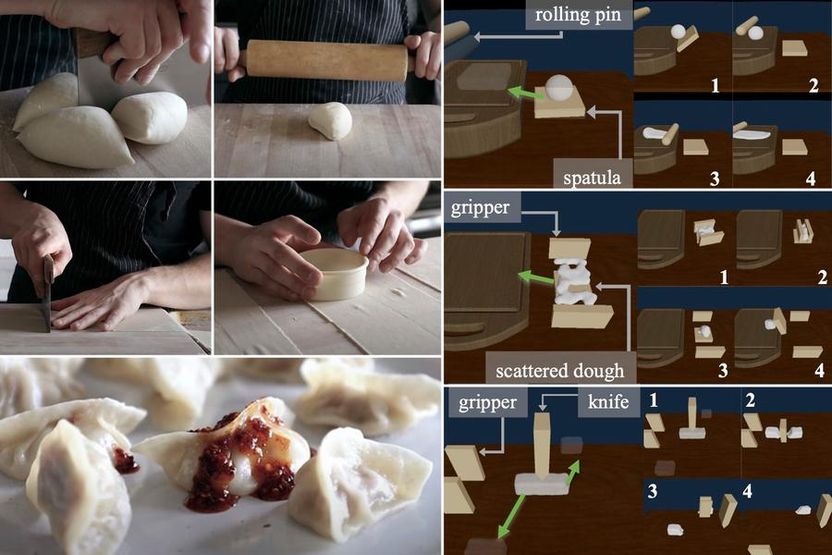
Stellen Sie sich einen Pizzabäcker vor, der mit einer Teigkugel arbeitet. Sie könnte den Teig mit einem Spatel auf ein Schneidebrett heben und ihn dann mit einem Nudelholz zu einem Kreis ausrollen. Einfach, oder? Nicht, wenn dieser Pizzabäcker ein Roboter ist.
Für einen Roboter ist es schwierig, mit einem verformbaren Objekt wie Teig zu arbeiten, denn die Form des Teigs kann sich auf viele Arten ändern, die sich nur schwer mit einer Gleichung darstellen lassen. Außerdem erfordert die Herstellung einer neuen Form aus diesem Teig mehrere Schritte und den Einsatz verschiedener Werkzeuge. Für einen Roboter ist es besonders schwierig, eine Manipulationsaufgabe mit einer langen Abfolge von Schritten zu erlernen - bei der es viele mögliche Optionen gibt -, da das Lernen oft durch Versuch und Irrtum erfolgt.
Forscher des MIT, der Carnegie Mellon University und der University of California in San Diego haben nun einen besseren Weg gefunden. Sie schufen einen Rahmen für ein Roboter-Manipulationssystem, das einen zweistufigen Lernprozess verwendet, der es einem Roboter ermöglichen könnte, komplexe Aufgaben der Teigmanipulation über einen langen Zeitraum auszuführen. Ein "Lehrer"-Algorithmus löst jeden Schritt, den der Roboter ausführen muss, um die Aufgabe zu erfüllen. Dann trainiert er ein maschinelles Lernmodell, das abstrakte Ideen darüber erlernt, wann und wie die einzelnen Fähigkeiten, die er während der Aufgabe benötigt, wie z. B. die Verwendung eines Nudelholzes, auszuführen sind. Mit diesem Wissen kann das System entscheiden, wie es die Fähigkeiten ausführt, um die gesamte Aufgabe zu erledigen.

Die Forscher zeigen, dass diese Methode, die sie DiffSkill nennen, in der Lage ist, komplexe Manipulationsaufgaben in Simulationen auszuführen, wie z. B. das Schneiden und Verteilen von Teig oder das Aufsammeln von Teigstücken um ein Schneidebrett herum, und dabei andere Methoden des maschinellen Lernens zu übertreffen.
Neben dem Pizzabacken könnte diese Methode auch in anderen Bereichen eingesetzt werden, in denen ein Roboter verformbare Objekte manipulieren muss, wie z. B. bei einem Pflegeroboter, der ältere oder motorisch eingeschränkte Menschen füttert, badet oder anzieht.
"Diese Methode ist näher an der Art und Weise, wie wir als Menschen unsere Handlungen planen. Wenn ein Mensch eine Aufgabe mit langem Zeithorizont ausführt, schreiben wir nicht alle Details auf. Wir haben einen übergeordneten Planer, der uns grob die Etappen und einige der Zwischenziele vorgibt, die wir auf dem Weg dorthin erreichen müssen, und dann führen wir sie aus", sagt Yunzhu Li, Doktorandin im Computer Science and Artificial Intelligence Laboratory (CSAIL) und Autorin eines Papiers, in dem DiffSkill vorgestellt wird.
Zu den Co-Autoren von Li gehören der Hauptautor Xingyu Lin, Doktorand an der Carnegie Mellon University (CMU); Zhiao Huang, Doktorand an der University of California in San Diego; Joshua B. Tenenbaum, der Paul E. Newton Career Development Professor of Cognitive Science and Computation in der Abteilung für Gehirn- und Kognitionswissenschaften am MIT und Mitglied des CSAIL; David Held, Assistenzprofessor an der CMU; und der Hauptautor Chuang Gan, Forschungswissenschaftler am MIT-IBM Watson AI Lab. Die Forschungsergebnisse werden auf der International Conference on Learning Representations vorgestellt.
Schüler und Lehrer
Der "Lehrer" im Rahmen von DiffSkill ist ein Algorithmus zur Trajektorienoptimierung, der Aufgaben mit kurzem Zeithorizont lösen kann, bei denen der Ausgangszustand und der Zielort eines Objekts nahe beieinander liegen. Der Trajektorienoptimierer arbeitet in einem Simulator, der die Physik der realen Welt modelliert (bekannt als differenzierbarer Physiksimulator, was das "Diff" in "DiffSkill" ausmacht). Der "Lehrer"-Algorithmus verwendet die Informationen des Simulators, um zu lernen, wie sich der Teig in jeder Phase bewegen muss, und gibt diese Bahnen dann aus.
Dann lernt das neuronale Netz des Schülers, die Aktionen des Lehrers zu imitieren. Als Eingaben verwendet es zwei Kamerabilder, eines, das den Teig in seinem aktuellen Zustand zeigt, und ein anderes, das den Teig am Ende der Aufgabe zeigt. Das neuronale Netz erstellt einen Plan auf hoher Ebene, um zu bestimmen, wie die verschiedenen Fähigkeiten miteinander verknüpft werden müssen, um das Ziel zu erreichen. Anschließend generiert es für jede Fähigkeit spezifische Trajektorien mit kurzem Zeithorizont und sendet die Befehle direkt an die Werkzeuge.
Die Forscher nutzten diese Technik, um mit drei verschiedenen simulierten Aufgaben zur Handhabung von Teig zu experimentieren. Bei einer Aufgabe verwendet der Roboter einen Spatel, um den Teig auf ein Schneidebrett zu heben, und dann ein Nudelholz, um ihn zu glätten. Bei einer anderen Aufgabe sammelt der Roboter mit einem Greifer Teig von der ganzen Theke, legt ihn auf einen Spatel und legt ihn auf ein Schneidebrett. Bei der dritten Aufgabe schneidet der Roboter einen Teigstapel mit einem Messer in zwei Hälften und transportiert dann jedes Stück mit einem Greifer an einen anderen Ort.
Eine Klasse für sich
DiffSkill war in der Lage, gängige Techniken zu übertreffen, die sich auf Verstärkungslernen stützen, bei dem ein Roboter eine Aufgabe durch Versuch und Irrtum erlernt. Tatsächlich war DiffSkill die einzige Methode, die alle drei Teigmanipulationsaufgaben erfolgreich bewältigen konnte. Interessanterweise stellten die Forscher fest, dass das neuronale Netzwerk des "Schülers" sogar in der Lage war, den "Lehrer"-Algorithmus zu übertreffen, so Lin.
"Unser System bietet eine neuartige Möglichkeit für Roboter, neue Fähigkeiten zu erwerben. Diese Fähigkeiten können dann verkettet werden, um komplexere Aufgaben zu lösen, die über die Fähigkeiten bisheriger Robotersysteme hinausgehen", so Lin.
Da sich ihre Methode auf die Steuerung von Werkzeugen (Pfannenwender, Messer, Nudelholz usw.) konzentriert, könnte sie auf andere Roboter angewendet werden, allerdings nur, wenn diese die von den Forschern definierten spezifischen Werkzeuge verwenden. Für die Zukunft planen sie, die Form eines Werkzeugs in die Überlegungen des "Studenten"-Netzwerks einzubeziehen, damit es auch auf andere Geräte angewendet werden kann.
Die Forscher beabsichtigen, die Leistung von DiffSkill zu verbessern, indem sie 3D-Daten als Eingaben verwenden, anstatt Bilder, die nur schwer von der Simulation in die reale Welt übertragen werden können. Außerdem wollen sie den Planungsprozess des neuronalen Netzes effizienter gestalten und mehr unterschiedliche Trainingsdaten sammeln, um die Fähigkeit von DiffSkill zur Verallgemeinerung auf neue Situationen zu verbessern. Langfristig hoffen sie, DiffSkill auf vielfältigere Aufgaben anwenden zu können, einschließlich der Manipulation von Stoffen.
Diese Arbeit wird zum Teil von der National Science Foundation, LG Electronics, dem MIT-IBM Watson AI Lab, dem Office of Naval Research und dem Defense Advanced Research Projects Agency Machine Common Sense Programm unterstützt.
Hinweis: Dieser Artikel wurde mit einem Computersystem ohne menschlichen Eingriff übersetzt. LUMITOS bietet diese automatischen Übersetzungen an, um eine größere Bandbreite an aktuellen Nachrichten zu präsentieren. Da dieser Artikel mit automatischer Übersetzung übersetzt wurde, ist es möglich, dass er Fehler im Vokabular, in der Syntax oder in der Grammatik enthält. Den ursprünglichen Artikel in Englisch finden Sie hier.

Weitere News aus dem Ressort Wissenschaft





















Holen Sie sich die Lebensmittel- und Getränke-Branche in Ihren Posteingang
Ab sofort nichts mehr verpassen: Unser Newsletter für die Lebensmittel- und Getränkeindustrie bringt Sie jeden Dienstag und Donnerstag auf den neuesten Stand. Aktuelle Branchen-News, Produkt-Highlights und Innovationen - kompakt und verständlich in Ihrem Posteingang. Von uns recherchiert, damit Sie es nicht tun müssen.